
Слово «робототехника» слышали все много раз. Но что это такое по сути?
По-английски оно звучит чуть покороче – robotics — но смысл совсем не меняется.
Робототехника – это наука создания технических систем с автоматизацией. Это значит, что робототехника, по сути есть синтез программирования управляющего софта, механики (это слово пришло из греческого – μηχανική (правда, красиво смотрится?=) ) - искусство построения машин) и электроники, так как роботы – всё же пока ещё электронные механизмы.
Космические аппараты, сервис-роботы, военные механизмы, производственные машины — роботов сейчас такое количество, что вряд ли кто возьмётся сходу перечислить все их виды (но немножко ). Робототехника же занимается обеспечением развития всех этих многочисленных направлений.
Так, например, для создания самого простого необходимо:
- наличие двигателя (как минимум – для движения ног),
- наличие систем поддержания равновесия (гироскопы, датчики определения положения, ультразвуковые датчики для определения препятствий),
- системы управления (может быть основана как на автономной программе, оперирующей данными с сенсоров, так и на внешнем пульте управления).
Датчики, двигатели, программа управления, интерфейс связи с оператором…
То есть даже для простого андроида нужна работа специалистов многих специальностей. Сегодня роботов уже столько, что ни у кого не возникает тезисов о том, что робототехника — наука только для будущего. А необходимость максимально эффективно разрабатывать новые решения и определили выделение робототехники в отдельную науку.
Роботы - часть стремительно надвигающегося будущего высоких технологий. В настоящее время на планете Земля в сфере робототехники революции происходят чуть ли не каждую неделю. Роботы спасают людей, работают в экстремальных условиях, заменяют живое общение, исследуют планеты Солнечной системы и многое другое. От слуг до наставников, роботы развиваются чрезвычайно быстрыми темпами. Работа в сфере робототехники на данный момент борется с самой важной задачей: как оснастить робота искусственным интеллектом. Говорят, именно с этой целью известный футуролог Рэй Курцвейл пришел работать в Google.
Главные материалы
У Ямена Сарайджи четыре руки. Две из них обнимают его. Конечности, охватывающие Сарайджи, длинные, долговязые и роботизированные, и они подключены к рюкзаку, который он носит. Руки управляются дистанционно другим человеком, который надел гарнитуру VR, и который видит мир с точки зрения Сарайджи (камеры, закрепленные на рюкзаке, обеспечивают хороший обзор) и использует ручные контроллеры для управления подключенными руками.
После обнимашек роботизированные руки отпускают Сарайджи и правая рука дает ему «пять».
Инженеры из Университета Карнеги – Меллона в сотрудничестве со специалистами из Миннесотского университета совершили настоящий прорыв в области разработки неивазивных методов управления роботизированным устройством. Используя неинвазивный нейрокомпьютерный интерфейс (BCI) ученые создали первую в мире роботизированную руку, управляемую человеческим мозгом и обладающую возможностью следить за направлением курсора мыши на экране компьютера. Как отмечает портал Tech Explore, сообщающий о разработке, возможность использования неинвазивного метода управления роботизированными устройствами будет иметь широкий спектр применений. Например, данная технологий может оказаться очень полезной для парализованных людей.
Роботехника - сравнительно новое и интенсивно развивающееся научное направление, вызванное к жизни необходимостью освоения новых сфер и областей деятельности человека, а также потребностью широкой автоматизации современного производства, направленной на резкое повышение его эффективности. Использование автоматических программируемых устройств - роботов - в исследовании космоса и океанских глубин, а с 60-х гг. нашего столетия и в производственной сфере, быстрый прогресс в области создания и использования роботов в последние годы обусловили необходимость интеграции научных знаний ряда смежных фундаментальных и технических дисциплин в едином научно-техническом направлении - робототехнике .
Идея создания роботов - механических устройств, своим внешним видом и действиями подобных людям или каким-либо живым существам, увлекала человечество с незапамятных времен. Даже в легендах и мифах человек стремился создать образ рукотворных существ, наделенных фантастической физической силой и ловкостью, способных летать, жить под землей и водой, действовать самостоятельно и в то же время беспрекословно подчиняться человеку и выполнять за него самую тяжелую и опасную работу. Еще в "Илиаде" Гомера (VI в. до н. э.) говорится о том, что хромоногий кузнец Гефест, бог огня и покровитель кузнечного ремесла, выковал из золота девушек, которые исполняли его поручения.
Навстречу ему золотые служанки вмиг подбегали, Подобные девам живым, у которых Разум в груди заключен и голос, и сила, Которых самым различным трудам обучали Бессмертные боги...
У современного человека эти "служанки" непременно ассоциируются с антропоморфными, т.е. созданными по образу и подобию человека, автоматическими универсальными устройствами - роботами.
Теория робототехники опирается на такие дисциплины, как электроника, механика, информатика, а также радиотехника и электротехника. Выделяют строительную, промышленную, бытовую, авиационную и экстремальную (военную, космическую, подводную) робототехнику.
Сегодня человечество практически вплотную подошло к тому моменту, когда роботы будут использоваться во всех сферах жизнедеятельности. Поэтому курсы робототехники и компьютерного программирования необходимо вводить в образовательные учреждения.
Изучение робототехники позволяет решить следующие задачи, которые стоят перед информатикой как учебным предметом. А именно, рассмотрение линии алгоритмизация и программирование, исполнитель, основы логики и логические основы компьютера.
Также изучение робототехники возможно в курсе математики (реализация основных математических операций, конструирование роботов), технологии (конструирование роботов, как по стандартным сборкам, так и произвольно), физики (сборка деталей конструктора, необходимых для движения робота-шасси).
Классы роботов
Манипуляционный робот - автоматическая машина (стационарная или передвижная), состоящая из исполнительного устройства в виде манипулятора, имеющего несколько степеней подвижности, и устройства программного управления, которая служит для выполнения в производственном процессе двигательных и управляющих функций. Такие роботы производятся в напольном, подвесном и портальном исполнениях. Получили наибольшее распространение в машиностроительных и приборостроительных отраслях.
Мобильный робот - автоматическая машина, в которой имеется движущееся шасси с автоматически управляемыми приводами. Такие роботы могут быть колёсными, шагающими и гусеничными (существуют также ползающие, плавающие и летающие мобильные робототехнические системы.
Компоненты роботов
Приводы - это «мышцы» роботов. В настоящее время самыми популярными двигателями в приводах являются электрические, но применяются и другие, использующие химические вещества или сжатый воздух.
Двигатели постоянного тока : В настоящий момент большинство роботов используют электродвигатели, которые могут быть нескольких видов.
Шаговые электродвигатели : Как можно предположить из названия, шаговые электродвигатели не вращаются свободно, подобно двигателям постоянного тока. Они поворачиваются пошагово на определённый угол под управлением контроллера. Это позволяет обойтись без датчика положения, так как угол, на который был сделан поворот, заведомо известен контроллеру; поэтому такие двигатели часто используются в приводах многих роботов и станках с ЧПУ.
Пьезодвигатели : Современной альтернативой двигателям постоянного тока являются пьезодвигатели, также известные как ультразвуковые двигатели. Принцип их работы весьма оригинален: крошечные пьезоэлектри

ческие ножки, вибрирующие с частотой более 1000 раз в секунду, заставляют мотор двигаться по окружности или прямой. Преимуществами подобных двигателей являются высокое нанометрическое разрешение, скорость и мощность, несоизмеримая с их размерами. Пьезодвигатели уже доступны на коммерческой основе и также применяются на некоторых роботах.
Воздушные мышцы : Воздушные мышцы - простое, но мощное устройство для обеспечения силы тяги. При накачивании сжатым воздухом мышцы способны сокращаться до 40 % от своей длины. Причиной такого поведения является плетение, видимое с внешней стороны, которое заставляет мышцы быть или длинными и тонкими, или короткими и толстыми[источник не указан 987 дней]. Так как способ их работы схож с биологическими мышцами, их можно использовать для производства роботов с мышцами и скелетом, аналогичными мышцам и скелету животных.
Электроактивные полимеры : Электроактивные полимеры - это вид пластмасс, который изменяет форму в ответ на электрическую стимуляцию. Они могут быть сконструированы таким образом, что могут гнуться, растягиваться или сокращаться. Впрочем, в настоящее время нет ЭАП, пригодных для производства коммерческих роботов, так как все ныне существующие их образцы неэффективны или непрочны.
Эластичные нанотрубки : Это - многообещающая экспериментальная технология, находящаяся на ранней стадии разработки. Отсутствие дефектов в нанотрубках позволяет волокну эластично деформироваться на несколько процентов. Человеческий бицепс может быть заменён проводом из такого материала диаметром 8 мм. Подобные компактные «мышцы» могут помочь роботам в будущем обгонять и перепрыгивать человека.
Способы перемещения
Колёсные и гусеничные роботы
Шагающие роботы
Другие методы перемещения:
- Летающие роботы (в том числе БПЛА – беспилотные летательные аппараты).
- Ползающие роботы.
- Роботы, перемещающиеся по вертикальным поверхностям.
- Плавающие роботы.
Системы управления
Под управлением роботом понимается решение комплекса задач, связанных с адаптацией робота к кругу решаемых им задач, программированием движений, синтезом системы управления и её программного обеспечения.
По типу управления робототехнические системы подразделяются на:
1. Биотехнические :
1.1. командные (кнопочное и рычажное управление отдельными звеньями робота);
1.2. копирующие (повтор движения человека, возможна реализация обратной связи, передающей прилагаемое усилие, экзоскелеты);
1.3. полуавтоматические (управление одним командным органом, например, рукояткой всей кинематической схемой робота);
2. Автоматические :
2.1. программные (функционируют по заранее заданной программе, в основном предназначены для решения однообразных задач в неизменных условиях окружения);
2.2. адаптивные (решают типовые задачи, но адаптируются под условия функционирования);
2.3. интеллектуальные (наиболее развитые автоматические системы);
3. Интерактивные :
3.1. автоматизированные (возможно чередование автоматических и биотехнических режимов);
3.2. супервизорные (автоматические системы, в которых человек выполняет только целеуказательные функции);
3.3. диалоговые (робот участвует в диалоге с человеком по выбору стратегии поведения, при этом как правило робот оснащается экспертной системой, способной прогнозировать результаты манипуляций и дающей советы по выбору цели).
Среди основных задач управления роботами выделяют такие:
- планирование положений;
- планирование движений;
- планирование сил и моментов;
- анализ динамической точности;
- идентификация кинематических и динамических характеристик робота.
В развитии методов управления роботами огромное значение имеют достижения технической кибернетики и теории автоматического управления.
Подвиды современных роботов:
- Промышленные роботы

- Медицинские роботы

- Бытовые роботы
- Роботы для обеспечения безопасности
- Боевые роботы
- Роботы-учёные
К настоящему времени роботы внедрены во многие сферы деятельности человека и продолжают дополнять и иногда заменять людской труд как в опасных видах деятельности, так и в повседневной жизни.
Робот - это программируемое механической устройство, способное выполнять задачи и взаимодействовать с внешней средой без помощи со стороны человека. Робототехника - это научная и техническая база для проектирования, производства и применения роботов.
Слово «робот» было впервые использовано чешским драматургом Карлом Чапеком в 1921. В его произведении «Универсальные роботы Россума» речь шла о классе рабов, искусственно созданных человекоподобных слуг, сражающихся за свою свободу. Чешское слово «robota» означает «принудительное рабство». Слово «робототехника» было впервые применено известным автором научной фантастики Айзеком Азимовым в 1941 году.
Базовые компоненты робота
Компоненты робота: тело/рама, система управления, манипуляторы, и ходовая часть.
Тело/рама: Тело, или рама, робота может иметь любую форму и размер. Изначально, тело/рама обеспечивает конструкцию робота. Большинство людей знакомы с человекоподобными роботами, используемыми для съемок кинофильмов, но в действительность большинство роботов не имеют ничего общего с человеческим обликом. (Робонафт НАСА, представленный в предыдущем разделе, является исключением). Как правило, в проекте робота внимание уделяется функциональности, а не внешности.
Система управления:
Система управления робота является эквивалентом центральной нервной системы человека. Она предназначена для координирования управления всеми элементами робота. Датчики реагируют на взаимодействие робота с внешней средой. Ответы датчиков отправляются в центральный процессор (ЦП). ЦП обрабатывает данные с помощью программного обеспечения и принимает решения на базе логики. То же самое происходит при вводе пользовательской команды.
Манипуляторы:
Для выполнения задачи большинство роботов взаимодействует с внешней средой, а также окружающим миром. Иногда требуется перемещение объектов внешней среды без непосредственного участия со стороны операторов. Манипуляторы не являются элементом базовой конструкции робота, как его тело/рама или система управления, то есть робот может работать и без манипулятора. В настоящем учебном курсе акцент делается на тему манипуляторов, особенно блок 6.
Ходовая часть: Хотя некоторые роботы могут выполнять поставленные задачи, не изменяя свое местоположение, зачастую от роботов требуется способность перемещаться из одного места в другое. Для выполнения данной задачи роботу необходима ходовая часть. Ходовая часть представляет собой приводное средство перемещения. Роботы-гуманоиды оснащены ногами, тогда как ходовая часть практически всех остальных роботов реализована с помощью колес.
Возможности применения и примеры роботов
На сегодняшний день, роботы имеют массу применений. Области применения делятся на три основные категории:
- промышленные роботы;
- исследовательские роботы;
- образовательные роботы.
Промышленные роботы
В промышленности, для выполнения огромного количества работ необходимы высокая скорость и точность. В течение многих лет ответственность за выполнение подобных работ несли люди. С развитием технологий, использование роботов позволило ускорить и повысить точность многих производственных процессов. Это и упаковка, сборка, окраска и укладка на поддоны. Изначально, роботы выполняли только особые виды повторяющихся работ, где требовалось соблюдение простого заданного набора правил. Тем не менее, с развитием технологий промышленные роботы стали гораздо более подвижны, и теперь они способны принимать решения на основе сложного ответа от датчиков. Сегодня промышленные роботы часто оснащены системами технического зрения. К концу 2014 года международная робототехническая федерация прогнозировала объем применения промышленных роботов по всему миру свыше 1,3 миллиона единиц!

Роботы могут использоваться для выполнения сложных, опасных задач, а также задач, которые человек выполнить не в состоянии. Например, роботы способны обезвреживать бомбы, обслуживать ядерные реакторы, исследовать глубины океана и достигать самых дальних уголков космоса.
Исследовательские роботы
Роботы имеют широкое применение в мире исследований, так как их часто используют для выполнения задач, в решении которых человек беспомощен. Наиболее опасные и сложные среды находятся под поверхностью Земли. В целях изучения космического пространства и планет солнечной системы в НАСА на протяжении использовались космические аппараты, посадочные модули и вездеходы с функциями роботов.
Роботы Pathfinder и Sojourner
Для марсианской миссии Pathfinder была разработана уникальная технология, позволяющая осуществить доставку оборудованного посадочного модуля и роботизированного вездехода, Sojourner, на поверхность Марса. Sojourner был первым вездеходом, отправленным на планету Марс. Масса вездехода Sojourner на поверхности земли составляет 11 кг (24,3 фунта), на поверхности Марса - прибл. 9 фунтов, а его размеры сопоставимы с размерами детской коляски. Вездеход имеет шесть колес и может перемещаться со скоростью до 0,6 метров (1,9 футов) в минуту. Миссия была запущена на поверхности Марса 4 июля 1997 года. Pathfinder не только выполнил свою прямую задачу, но также вернулся на Землю с огромным количеством собранных данных и превысил свой проектный срок эксплуатации.

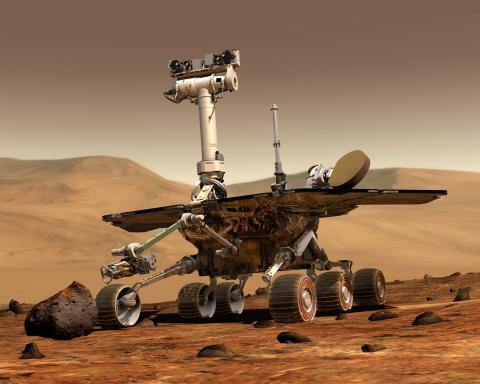
Вездеходы Spirit и Opportunity
Марсианские исследовательские вездеходы (MER) Spirit и Opportunity были отправлены на Марс летом 2003 года и приземлились в январе 2004 года. Их миссия состояла в исследовании и классификации большого количества камней и почв с целью обнаружения остатков воды на Марсе, в надежде на отправку на планету человеческой миссии. Несмотря на то, что запланированная длительность миссии составляла 90 дней, в действительности она превысила шесть лет. За это время было собрано бесчисленное количество геологических данных о Марсе.

Роботизированная рука космического корабля
Когда проектировщики НАСА впервые приступили к проектированию космического корабля, они столкнулись с задачей, выраженной в необходимости безопасной и эффективной доставки в космическое пространство огромного, но, к счастью, невесомого объема груза и оборудования. Система дистанционного манипулирования (RMS), или Канадарм (канадский дистанционный манипулятор), совершила свой первый выход в космос 13 ноября 1981 года.
Рука имеет шесть подвижных соединений, имитирующих человеческую руку. Два соединения расположены в плече, одно - в локте, и еще три - в кисти. На конце кисти установлено захватное устройство, способное захватывать или зацеплять требуемый груз. В условиях невесомости рука способна поднимать 586 000 фунтов груза и выполнять их размещение с удивительной аккуратностью. Общая масса руки на поверхности Земли составляет 994 фунта.
RMS использовалась для запуска и поиска спутников, а также оказалась бесценным помощником для астронавтов в процессе ремонта космического телескопа Хаббла. Последняя миссия Канадарм в составе космического корабля стартовала в июле 2011 года и стала девяностой миссией этого робота.

Мобильные обслуживающие системы
Мобильная обслуживающая система (MSS) представляет собой систему, аналогичную RMS, и известна также как Канадарм 2. Система была спроектирована для установки на международной космической станции в качестве объектного манипулятора. MSS предназначена для обслуживания оборудования и приборов, установленных на международной космической станции, а также для оказания помощи при транспортировке продовольствия и оборудования в пределах станции.

Dextre
В рамках космической миссии STS-123 в 2008, космический корабль Endeavor осуществлял перевозку последней части гибкого манипулятора специального назначения Dextre.
Dextre - это робот, оснащенный двумя не большими руками. Робот способен выполнять задачи по точной сборке, которые до этого выполняли астронавты во время входа в открытый космос. Dextre может транспортировать объекты, пользоваться инструментами и осуществлять установку или удаление оборудования на космической станции. Dextre также оснащен освещением, видео-оборудованием, инструментальной базой, а также четырьмя держателями для инструментов. Датчики позволяют роботу «чувствовать» объекты, с которыми он имеет дело, и автоматически реагировать на движения или изменения. Команда может наблюдать за работой с помощью четырех установленных камер.
По конструкции робот напоминает человека. Верхняя часть его тела может поворачиваться в талии, а плечи удерживают руки, расположенные с двух сторон.

Роботы в образовании
Робототехника стала увлекательным и доступным инструментом обучения и поддержки STEM, проектирования и подходов к решению задач. В робототехнике, учащиеся получают возможность реализовать себя в роли проектировщиков, артистов и техников одновременно, используя собственные руки и голову. За счет этого открываются огромные возможности применения научных и математических основ.
В современной системе образования, с учетом финансовых ограничений, средние и высшие школы находятся в постоянном поиске экономически выгодных путей преподавания сложных программ, сочетающих технологии с множеством дисциплин, учащимся для их подготовки к профессиональной деятельности. Преподаватели сразу видят преимущества робототехники и данного учебного курса, так как в них реализован межпредметный метод сочетания различных дисциплин. В дополнение, робототехника предлагает наиболее доступное и подходяще для повторного использования оборудование.
Сегодня более чем когда либо, школы применяют робототехнические программы в классе для "оживления" учебных курсов и обеспечения соответствия широкому спектру академических стандартов, необходимых для учащихся. Робототехника не только является уникальной и широкой базой для преподавания разнообразных технических дисциплин, но также областью техники, оказывающей значительное влияние на развитие современного общества.
Почему робототехника важна?
Как видно из раздела «Возможности применения и примеры роботов», робототехника является новой областью техники, применяемой во многих сферах жизни человека. Важным фактором развития общества является образованность всех его членов в части существующих технологий. Но это не единственная причина возрастающей значимости робототехники. Робототехника уникальным образом сочетает в себе основы дисциплин STEM (естественные науки, технологии, инженерия и математика). В процессе обучения в классе учащиеся изучают различные дисциплины и их взаимосвязи, используя современные, технологичные и увлекательные инструменты. Помимо этого, визуальное представление проектов, которое требуется от учащи, стимулирует их к экспериментам и проявлению изобретательности в процессе поиска эстетичных и работоспособных решений. Комбинируя эти аспекты работы, учащиеся поднимают свои знания и возможности на новый уровень.